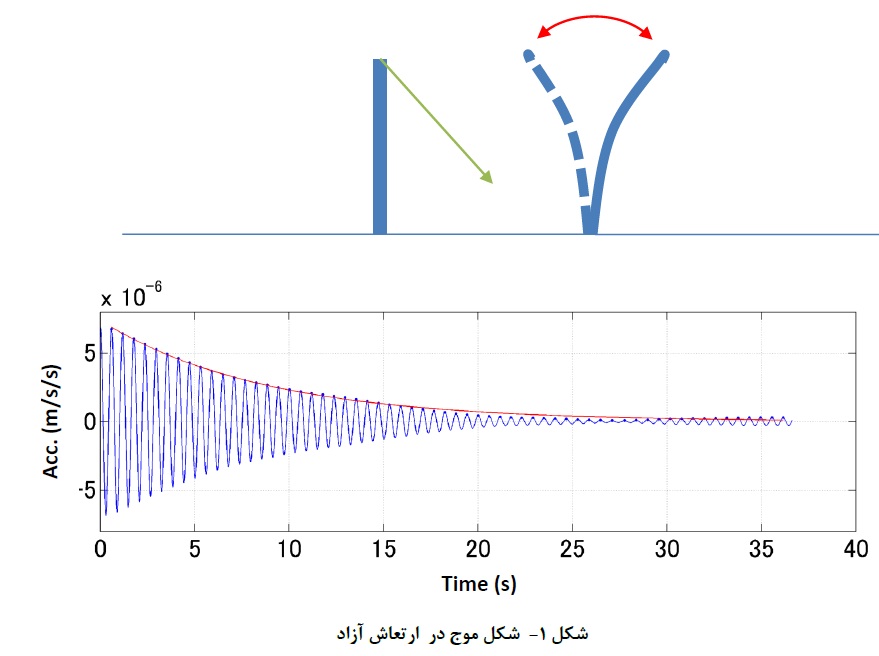
نخست امواج بدست آمده از ارتعاش محیطی را پردازش کرده و در محدوده فرکانس مورد نظر (فرکانس ارتعاش سازه) از یک فیلتر باند پس(Band-pass filter) عبور می دهیم. سپس امواج بدست آمده را به قطعات کوچکتر (segment) تقسیم می نماییم (شکل 1) . طول زمان جهت هر قطعه می بایست بقدری باشد تا تابع RD بدست آمده به طور نسبتا کاملی کاهش دامنه را تجربه کند. همچنین هر چقدر تعداد قطعات اندازه گیری شده بیشتر باشد، نوفه موجود در تابع RD براثر میانگین گیری به حداقل کاهش خواهد یافت.

شکل -1
تابع اتلاف تصادفی را برای Triggering level a می توان به صورت زیر نوشت
![]()
که در آن N تعداد دفعات میانگین گیری می باشد.
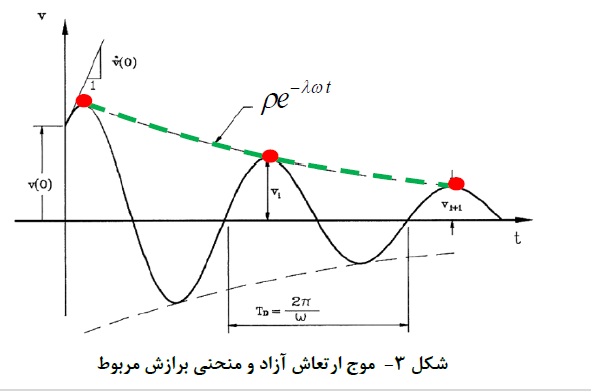
با بدست آوردن تابع RD که در واقع همان پاسخ ارتعاش آزاد سازه می باشد می توان مقادیر فرکانس ارتعاشی و نسبت میرایی سازه را از روش های ارائه شده در قسمت ارتعاش آزاد بدست آورد.